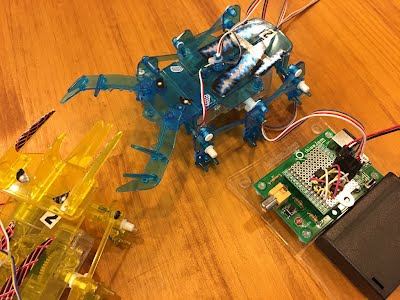
「タミヤ 昆虫ロボット2チャンネル(2モーター) の IchigoJam接続向け改造」
IchigoJam を使ったワークショップ や IchigoJamの工作などの可能性を伝える為に、OUT1 から OUT4 を利用した、モーターの制御を行っています。簡単な命令で、ロボットが動作するため、子供に人気です。昆虫ロボットの改造に、いくつか手順が必要になっているので、ツール化が出来ると嬉しいポイントと共に説明します。
概要:
- 材料
- タミヤ ロボクラフト 昆虫 :1つ
- いくつかのケーブル or コネクタ類
- 別途必要なもの :
- IchigoJamに接続できる モータードライバ
- 完成イメージ:
手順: (完成前の手順を示しますが、組み立て後でも可)
- ロボットのコントローラー を取り出す
- コントローラーの基板近くで、ケーブルを切る。基板から5cm程度のところが良いと思います(後述の工作の為)
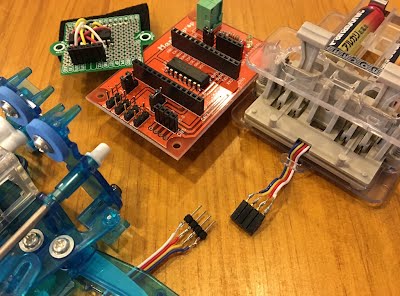
- 切ったケーブルの終端側に、モータードライバ接続用のコネクタ(オス)を付ける
- 各種モータードライバに接続が可能になります
- 余裕があれば、コントローラーの基板側にコネクタ(メス)を付ければ、遊ぶ事もできます

ツール化できると嬉しいポイント:
- コネクタ(オス)をつける改造が難しいと思いますので、その点を改善できるツールがあると良いと考えています。
- 案0:ジャンパワイヤー 4本 を、配線露出して接続
- ジャンパワイヤー(1芯) x 4本
- モーターの配線(4芯)に、各1本ずつねじって継ぎ足す
- (Option)継ぎ足し部分のハンダ
- 継ぎ足し部分にビニールテープをまいておく (or 熱収縮チューブ)
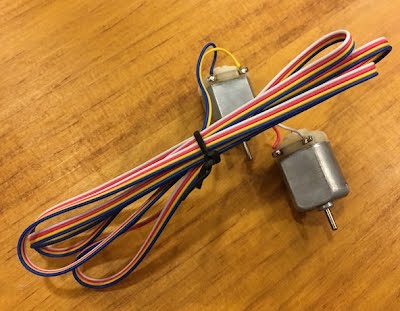
- 案1:QIコネクタプラグ付き ワイヤーケーブル(4芯)
- QIコネクタ(オス) ==== ワイヤーケーブル(4芯) ==== 終端加工なし
- QIコネクタ側 => IchigoJamのモータードライバ
- 終端加工なし側 => 昆虫ロボットのモーターへはんだ付けに使う
- モーターへの配線のはんだ付けであれば、QIコネクタ取り付けよりも容易だろう!
- 案2:タミヤキットのモーター == コントローラー間に、QIコネクタを事前取り付け
- 案0:ジャンパワイヤー 4本 を、配線露出して接続


商品など
- タミヤ ロボクラフトシリーズ No.20 2チャンネル リモコン昆虫対戦セット カブトムシ vs. クワガタムシ 71120
- カブトムシ と クワガタ が1台ずつ入ったセット。単3電池2本で動作するコントローラー付き
- リンク機構により、モーターの回転が、足の前後運動に変換されていたりと機械工学の基礎を学ぶのに良い。
- タミヤ プレスリリース (動画あり)

- モータードライバ MapleSyrup
- 3,580円でつくるプログラマブル自律6足歩行ロボット
- モータードライバ IC SN754410NE (4回路ハーフブリッジドライバー) を利用した自作方法
- IchigoJam用ユニバーサル基板上に作ると、サイズがピッタリ
- 例) ユニバーサル基板 [P-JAM-EXT-U] , http://www.aitendo.com/product/12044
- コネクタ(オス)
- ピンヘッダー ※特別な工具は不要だが、はんだ付けの難易度は高い
- QI コネクタ ※後述の圧着工具が必要
- QIコネクタ用プラグコンタクトピン , http://eleshop.jp/shop/g/g78P411/
- QIコネクタ4ピン用ハウジング , http://eleshop.jp/shop/g/g4AM144/
- コネクタ(メス)
- ヘッダーソケット ※特別な工具は不要
- QI コネクタ ※後述の圧着工具が必要
- QIコネクタ用コンタクトピン , http://eleshop.jp/shop/g/g4AM14A/
- QIコネクタ4ピン用ハウジング , http://eleshop.jp/shop/g/g4AM144/
- コネクタ圧着用

{kind=link}